Unlike industrial robots, cobots feature hand guiding, which allows for easy point teaching. To ensure the hand guiding functions optimally, a Dynamic Parameter Identification (DPI) calibration needs to be performed.
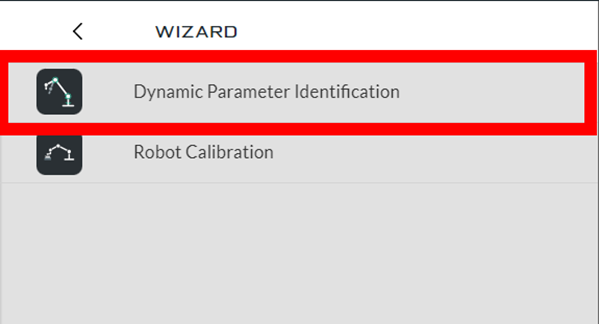
Follow the prompted steps and complete the calibration.
*During the calibration, collision detection will be turned off. So, make sure no personnel is close to the robot and operator should always have hands on the emergency stop in case of any tool collision or general collision
If circumstances do not allow you to perform DPI, you can temporarily adjust holding torque to arbitrarily give an offset to the robot to prevent movements during hand guiding.
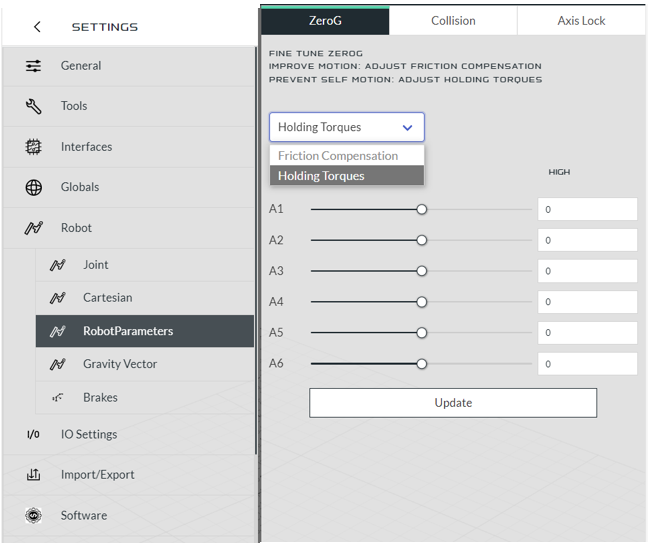
Adjust the axis causing the robot to shift to mitigate the effect. This method is intended only for short-term use. DPI is still recommended for long-term solutions.
