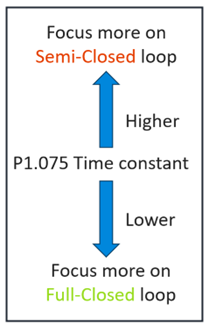
Parameter 1.075 (P1.075) is a time constant for low pass filter that focuses either on full-closed loop (use of auxiliary encoder) or semi closed loop (use of internal encoder)
It is used to overcome the insufficient stiffness of the mechanical system during transient states.
If the system has insufficient stiffness during transient state, we put a higher value for the time constant. In this way, the control system focuses more on the internal encoder (Semi-closed loop). After the system is steady state, the control system goes back to focus on the auxiliary encoder (Full-closed loop).
When the value for P1.075 (the time constant) is zero, then the filter is disabled, and the focus is only on Full-Closed loop.