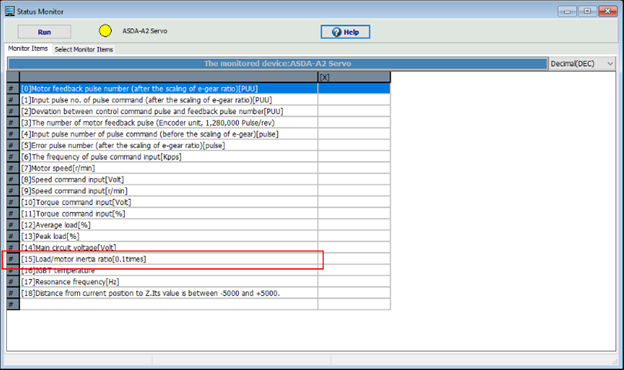
The auto-tuning function is not possible to be used to adjust the gain of a gantry axes system. It must be done with the manual tuning method. The point is to move both axes at the same time by sending positioning commands from the master controller. Then, the measured inertia ratio must be observed on both servo drives. You may monitor it on the servo drive display or on the ASDASoft, as you can see below.
When the inertia ratio value becomes stable, you must calculate the gain parameters on ASDASoft by entering the inertia ratio value to the screen below and send them to the drive with the steps below. This will be done for both servos individually.
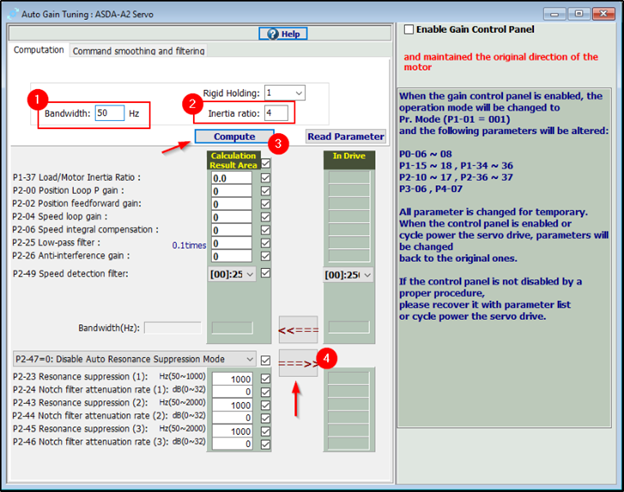
Starting with a Bandwidth setting of 50 Hz is recommended. Then it may be increased in steps of 10Hz (60Hz-70Hz-80Hz…), calculated each time, and sent to the drives. This bandwidth will affect the servo’s stiffness (response time, settling time, position accuracy etc.). After a calculation made for 50Hz, if the system works properly, there is no need to increment it and calculate again.
