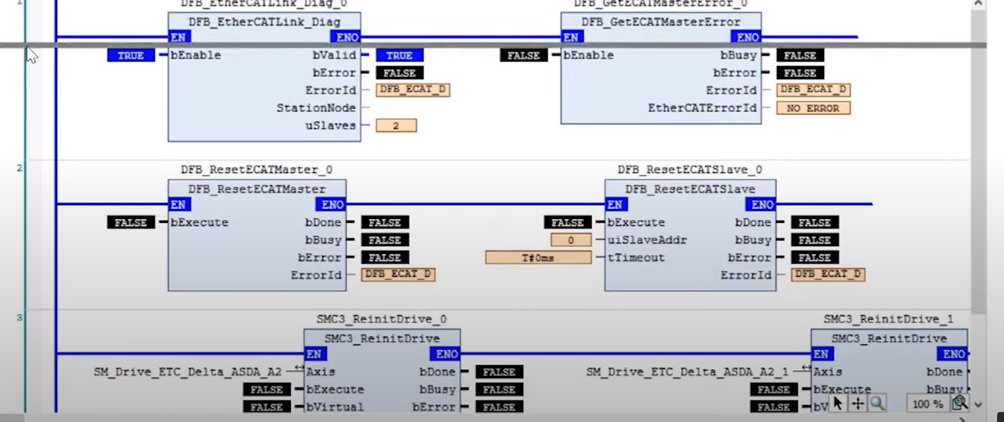
There are two distinct methods to address this issue. The first involves using the Delta library named DFB_EtherCAT_diag, and you can follow the specific steps outlined in the YouTube video. The function blocks utilized in this method are shown below.
Alternatively, you can employ standard CODESYS function blocks as another approach.
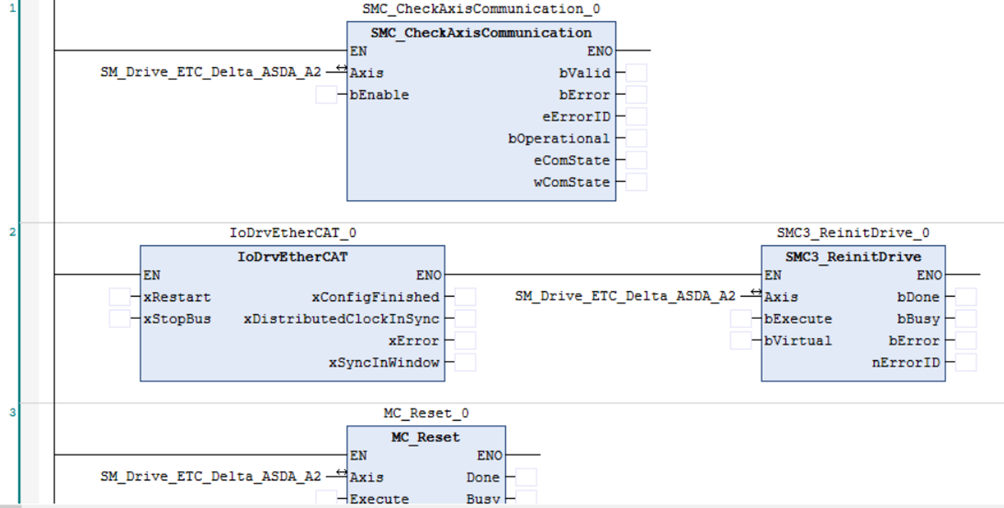
IoDrvEtherCAT restarts the EtherCAT bus, SMC3_ReinitDrive re-initializes the relevant devices. While MC_Reset isn’t mandatory, it can be beneficial in many applications to clear non-bus related faults. Additionally, SMC_CheckAxisCommunication is a useful function block for assessing the communication status of a specific device
