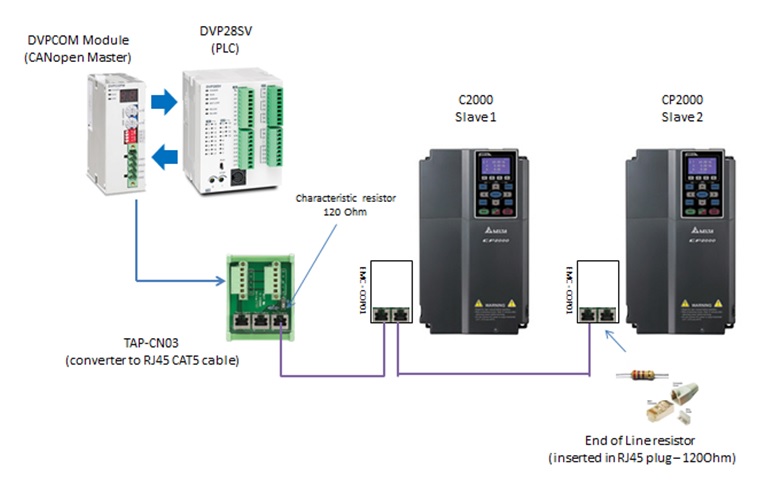
CANopen is based on a data link layer (layer 2) according to ISO 11898-1. CANopen assumes a physical layer (layer 1) according to ISO 11898-2. Nevertheless, CANopen does not exclude other physical layer options. CANopen runs on RS-485 electrical mean and it was a protocol designed firstly for motion control and machine tools. As a CAN based communication, CANopen was developed as an embedded and standardized fieldbus with highly flexible capabilities. Today it is used in various application fields, such as medical equipment, off-road vehicles, maritime electronics, railway applications and general automation. CANopen in practice requires a master to send and manage data though the slaves, those slaves have their functions mapped in PDO from their EDS file, a file which contains the addressable data. On this application Note we are going to learn how to use DVPCOPM, a separate CANopen module from DVP family to address C2000 and CP2000 as CANopen slaves in speed mode to send and retrieve important drive data, such as speed, current and torque, control word, frequency command.
Example program with ISPSoft is listed here:
